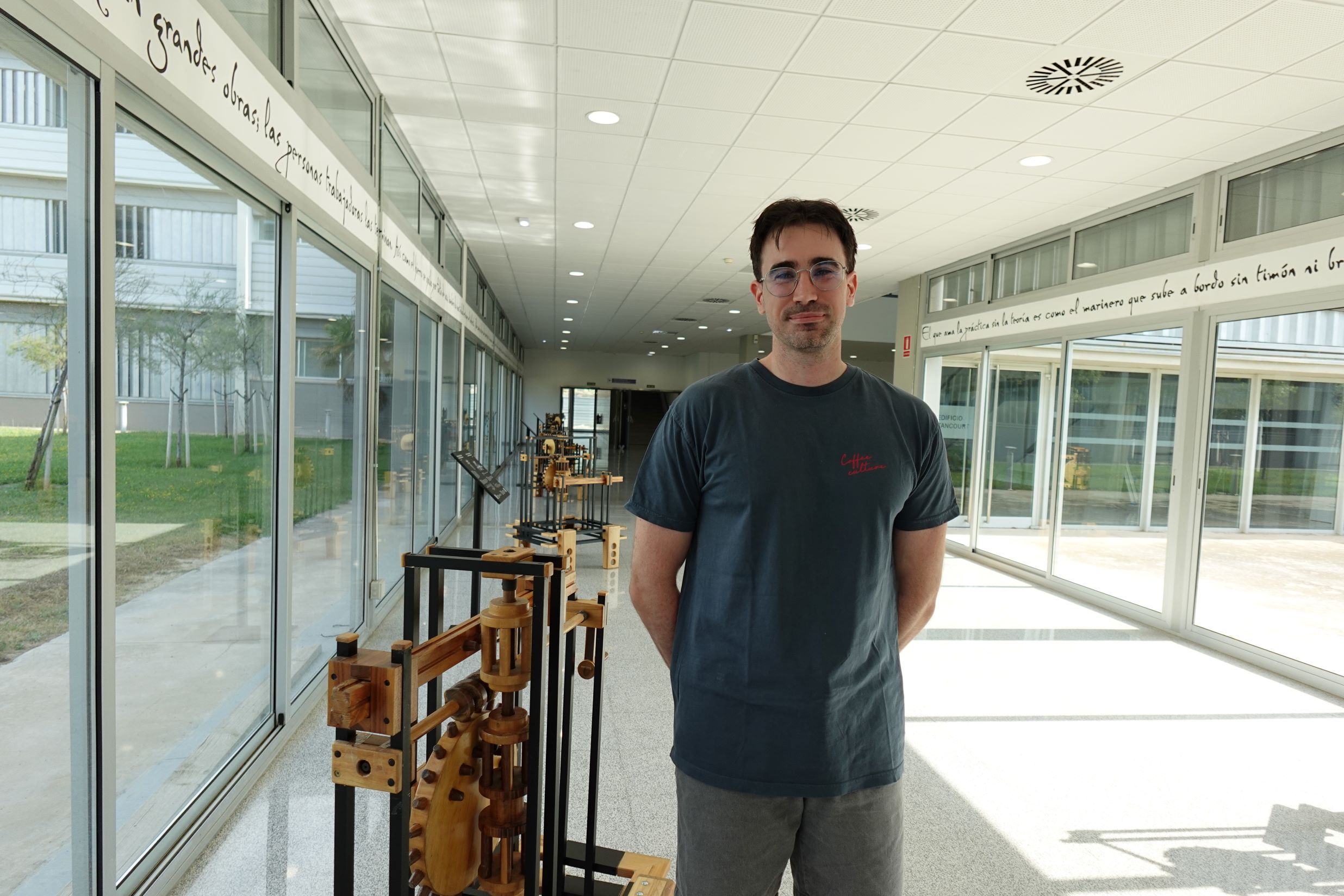
The day machines are able to perceive the world, they will be able to interact with it. This is the idea that Carlos Campos Martínez, PhD in the PhD programme in Systems Engineering and Computer Science, now winner of the GTRob award for the Best Doctoral Thesis on Robotics, carried out in the Robotics research group of the I3A, RoPeRT, has been working on. An award he received at the Jornadas de Automática 2022 held in Logroño.
A thesis (Precise and Robust Visual SLAM with Inertial Sensors and Deep Learning), with which he wants to go one step further towards achieving machines that are capable of perceiving, orienting themselves and making decisions on their own. "This will allow humans to get rid of the most tedious and dangerous tasks and focus on those with a more human and rational component," says Carlos Campos.
His research work focuses on computer vision applied to Robotics, localisation and simultaneous scene reconstruction (SLAM), which encompasses all techniques that allow robots to estimate their position and reconstruct their environment at the same time, using only the set of sensors on board. SLAM is the key element for machine perception, present in technologies and applications such as autonomous driving, virtual and augmented reality or service robots.
"Increasing the robustness of SLAM would extend its use and application, making machines safer and with less human intervention. This has been the ultimate goal of this thesis," he explains.
The interest aroused by the work of this thesis in the academic world is reflected in the large number of citations received, more than 800 in the different publications. The multiple applications of SLAM in the real world, especially in autonomous navigation and virtual reality, have already reached the business world. Different versions of software developed during this thesis have been marketed to companies in America, Europe and Asia, "which is evidence of the novelty and usefulness of our work", adds Carlos Campos.
What does the doctoral thesis contribute?
In a first part of this thesis, inertial and visual sensors are combined to increase the robustness of the SLAM to fast movements, brief occlusions or poorly textured environments. Two different techniques are proposed to initialise the system quickly, which have been integrated into a new inertial visual SLAM system, coined ORB-SLAM3. This system, developed jointly with other PhD students, represents the major contribution of this thesis and is the most complete open-source visual-inertial SLAM system to date. Based on a Maximum a Posteriori formulation, ORB-SLAM3 works with monocular or stereo, pinhole or fisheye cameras, and is the most accurate system in various public evaluation experiments.
In a second part of the thesis, the application of deep learning techniques to improve the robustness of SLAM is explored. First, a stereo SLAM system is developed for dynamic environments. Dynamic objects are segmented by a neural network, which allows estimating and tracking moving objects, while improving the camera trajectory estimation. Secondly, it develops a monocular SLAM based on depth predictions through neural networks, which allows to obtain the true scale of the environment and to increase the accuracy with respect to a classical monocular system.
Carlos Campos has been part of the Robotics group at the I3A for four years, while he was working on his doctoral thesis directed by the researcher Juan Domingo Tardós. This award "is the finishing touch to a perfect farewell to the University".
He studied Industrial Engineering at the University of Zaragoza and Telecommunications Engineering at the University of Toulouse. He then returned to Zaragoza to do his doctorate, a stage in which, despite the difficulties, "I think it is the best decision I have made professionally, to do a thesis in the Robotics group", he stresses. In addition, "having a PhD in computer vision is highly valued and gives you opportunities both at the University and in the company".
In fact, he now works in Madrid as a computer vision engineer, applying SLAM technology at the video game startup Arcturus Industries.
Award information: https://jautomatica.es/2022/premios.html